PROYEK ECOPARK ANCOL
Bagian I : Teori Singkat
Penulis disini menguraikan pengalaman di proyek Ecovention Ancol untuk pemasangan dan operasi unit A/C Split Duck sistem VRF atau umum di kenal VRV merk York tipe YDCP28OHONE-0A1 untuk indoor unit kapasitas 10 pk dan tipe YDOH160EVV-0C1 (36pk) & YDOH480EVV-0C1 (48pk) untuk itu kita mengingat kembali sekilas mengenai :
Aliran Refrigeran Variabel (VRV)
Refrigeran aliran variabel (VRF) adalah sebuah teknologi HVAC ditemukan di Jepang pada 1990-an. VRF menggunakan refrigerant sebagai media pendingin / pemanas, dan memungkinkan satu unit kondensasi luar dihubungkan ke beberapa ruangan fan-coil unit (FCUs), masing-masing unit indoor dikontrol oleh pengguna, sementara modulasi jumlah refrigeran yang dikirim ke masing-masing evaporator . Dengan beroperasi pada kecepatan yang berbeda-beda, unit VRF bekerja hanya pada tingkat yang diperlukan untuk memungkinkan penghematan energi substansial pada bagian-beban kondisi. Teknologi VRF memungkinkan unit indoor individu untuk dingin sesuai kebutuhan, Penghematan energi hingga diperkirakan 55%.
Kompresor Spiral (Scroll Compressor)

Sebuah kompresor spiral (juga disebut spiral kompresor atau pompa vakum spiral ) adalah perangkat untuk mengompresi udara atau pendingin. Hal ini digunakan dalam AC peralatan, sebagai mobil supercharger (di mana ia dikenal sebagai supercharger jenis gulungan ) dan sebagai pompa vakum .
Sebuah operasi kompresor spiral secara terbalik dikenal sebagai expander spiral, dan dapat digunakan untuk menghasilkan kerja mekanik dari ekspansi cairan, udara bertekanan atau gas.
Sejarah
Léon Creux adalah orang yg pertama menemukan kompresor spiral pada tahun 1905 di Perancis (Paten nomor 801.182). Creux awalnya menciptakan kompresor sebagai konsep mesin uap rotary, namun teknologi pengecoran logam masa itu tidak cukup maju untuk membangun prototipe bekerja, karena kompresor spiral menuntut toleransi yang sangat ketat untuk berfungsi secara efektif. Kompresor spiral pertama praktis tidak muncul di pasar sampai setelah Perang Dunia II , ketika peralatan mesin konstruksi presisi tinggi mereka diperkenalkan .
Mereka tidak diproduksi secara komersial untuk pengkondisian udara sampai awal 1980-an.
Desain
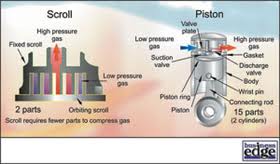
Sebuah kompresor spiral menggunakan dua gulungan interleaving untuk memompa , kompres atau menekan cairan seperti cairan dan gas . Seringkali, salah satu gulungan adalah tetap, sedangkan orbit lainnya eksentrik tanpa berputar, sehingga menjebak dan memompa atau menekan kantong cairan antara gulungan. Metode lain untuk menghasilkan gerakan kompresi adalah co-rotating gulungan, dalam gerakan sinkron, tapi dengan pusat-pusat offset rotasi. Gerakan relatif adalah sama seperti jika seseorang sedang mengorbit.
Aplikasi
- Air conditioner compressor
- Pompa vakum
- Superchargers untuk aplikasi otomotif,
Perbandingan Teknik dengan pompa lainnya
Kompresor Spiral
Perangkat ini dikenal untuk beroperasi lebih lancar, tenang, dan dapat dipercaya daripada kompresor konvensional dalam beberapa aplikasi. Tidak seperti piston, massa spiral mengorbit itu bisa diimbangi dengan sempurna, dengan massa yang sederhana, untuk meminimalkan getaran. proses gas spiral yang lebih berkelanjutan. Selain itu, kurangnya ruang mati memberikan peningkatan efisiensi volumetrik.
Rotasi dan aliran pulsa
Proses kompresi terjadi selama sekitar 2 sampai 2 ½ rotasi crankshaft, dibandingkan dengan satu putaran untuk kompresor rotary, dan satu-setengah rotasi untuk kompresor reciprocating . Debit spiral dan proses hisap terjadi untuk rotasi penuh, dibandingkan dengan kurang dari setengah-rotasi untuk proses hisap reciprocating, dan kurang dari seperempat-rotasi untuk proses pembuangan reciprocating. Namun, kompresor reciprocating memiliki beberapa silinder (biasanya, dua sampai enam), sedangkan kompresor spiral hanya memiliki satu elemen kompresi. Kehadiran beberapa silinder kompresor reciprocating mengurangi hisap dan pulsations debit. Oleh karena itu, sulit untuk menyatakan apakah kompresor spiral memiliki tingkat denyut lebih rendah dari kompresor reciprocating seperti yang sering diklaim oleh beberapa pemasok kompresor spiral. Aliran lebih mantap menghasilkan pulsations gas yang lebih rendah, suara lebih rendah dan getaran lebih rendah dari pipa terpasang, sementara tidak memiliki pengaruh pada efisiensi operasi kompresor.
Katup
Kompresor spiral tidak pernah memiliki katup isap, namun tergantung pada aplikasi mungkin atau mungkin tidak memiliki katup discharge. Penggunaan katup debit dinamis lebih menonjol dalam aplikasi rasio tekanan tinggi, khas pendinginan. Biasanya, sebuah gulungan AC tidak memiliki katup debit dinamis. Penggunaan katup debit dinamis meningkatkan efisiensi kompresor spiral atas berbagai kondisi operasi, ketika rasio tekanan operasi jauh di atas rasio tekanan built-in dari kompresor. Namun, jika kompresor dirancang untuk beroperasi dekat titik operasi tunggal, maka kompresor spiral dapat benar-benar mendapatkan efisiensi sekitar titik ini jika tidak ada katup hadir debit dinamis (karena ada kerugian aliran tambahan debit terkait dengan kehadiran katup pembuangan serta pelabuhan debit cenderung lebih kecil ketika debit hadir).
Efisiensi
Proses isentropik efisiensi kompresor spiral sedikit lebih tinggi dari kompresor reciprocating khas ketika kompresor dirancang untuk beroperasi di dekat salah satu titik penilaian yang dipilih. Kompresor spiral lebih efisien dalam hal ini karena mereka tidak memiliki katup debit dinamis yang memperkenalkan kerugian throttling tambahan. Namun, efisiensi kompresor spiral yang tidak memiliki katup debit mulai menurun dibandingkan dengan kompresor reciprocating pada tekanan operasi yang lebih tinggi rasio. Ini adalah hasil dari apa yang disebut di bawah kompresi kerugian yang terjadi pada rasio tekanan operasi tinggi dari kompresor perpindahan positif yang tidak memiliki katup debit dinamis.
Proses kompresi volumetric spiral hampir seratus persen efisien dalam memompa cairan . Proses hisap menciptakan volume sendiri, terpisah dari proses kompresi dan debit lebih dalam. Sebagai perbandingan, kompresor reciprocating (piston) meninggalkan sejumlah kecil gas dikompresi dalam silinder, karena tidak praktis untuk piston untuk menyentuh kepala atau plat katup. Bahwa gas sisa dari siklus terakhir kemudian menempati ruang dimaksudkan untuk gas hisap. Penurunan kapasitas (yaitu volumetrik efisiensi) tergantung pada hisapan dan tekanan debit dengan pengurangan yang lebih besar terjadi pada rasio yang lebih tinggi dari debit tekanan hisap.
Keandalan
Kompresor spiral memiliki bagian-bagian yang bergerak lebih sedikit dibandingkan kompresor reciprocating yang, secara teoritis, harus meningkatkan kehandalan. Menurut Copeland, produsen besar kompresor spiral, kompresor spiral memiliki 70 persen bagian yang bergerak lebih sedikit, dibandingkan dengan kompresor reciprocating konvensional.
Ketahanan
Kompresor spiral lebih tahan terhadap kotoran, kotoran harus melewati setidaknya dua kantong kompresi tertutup. Gulungan yang beroperasi tanpa kesesuaian radial dan / atau aksial bahkan lebih tahan terhadap kerusakan yang disebabkan oleh benda asing.
Kompresor spiral menggunakan metode perlindungan yang berbeda di dalam kompresor untuk menangani situasi sulit. Beberapa desain spiral menggunakan katup pada titik-titik yang berbeda dalam proses kompresi untuk mengurangi tekanan di dalam elemen kompresi.
Ukuran
Kompresor spiral cenderung sangat kompak . Ukuran kecil dari kompresor spiral dan operasi yang tenang memungkinkan untuk unit dibangun ke dalam komputer kepadatan daya tinggi, seperti mainframe IBM. Kompresor spiral juga menyederhanakan desain pipa, karena mereka tidak memerlukan koneksi eksternal untuk pendingin primer.
Pembebanan Partial ( Partial loading)
Sampai saat ini, kompresor spiral hanya bisa beroperasi pada kapasitas penuh saat digerakan. Modulasi kapasitas itu dilakukan di luar set spiral. Untuk mendapatkan partial loading, insinyur akan memotong refrigeran dari siklus kompresi dan hisap, variasi kecepatan motor, atau menyediakan beberapa kompresor dan panggung mereka dan mematikan secara berurutan. Masing-masing metode memiliki kelemahan:
- Bypass pendek siklus siklus pendinginan normal dan memungkinkan beberapa gas sebagian dikompresi untuk kembali ke suction kompresor tanpa melakukan pekerjaan yang bermanfaat. Praktek ini mengurangi efisiensi sistem secara keseluruhan.
- Sebuah motor dua kecepatan koneksi lebih membutuhkan listrik dan beralih, menambah biaya, dan mungkin harus berhenti untuk beralih.
- Sebuah motor kecepatan variabel memerlukan perangkat tambahan untuk memasok daya listrik di seluruh rentang frekuensi yang diinginkan. Juga frekuensi hard variabel terkait dengan kompresor kecepatan variabel memiliki kerugian sendiri listrik, dan merupakan sumber biaya yang signifikan tambahan dan seringkali merupakan keprihatinan kehandalan tambahan.
- Compressor siklus (kompressor bekerja secara beurutan ) memerlukan kompresor lebih banyak dan dapat menjadi mahal. Selain itu, beberapa kompresor dalam sistem mungkin harus sangat kecil untuk mengontrol suhu proses akurat.
Baru-baru ini, kompresor spiral telah diproduksi yang dapat berjalan dengan beban dinamis dalam satu kompresor, kapasitas yg berubah sementara kompresor berjalan.
Emerson memproduksi kompresor spiral yang mampu dengan berbagai aliran refrigeran sesuai kebutuhan. Kompressor spiral tidak bekerja bersama-sama secara permanen, gulungan spiral diperbolehkan untuk bergerak terpisah secara berkala. Sebagian gulungan bergerak terpisah, motor terus berputar tapi gulungan spiral tidak bekerja untuk kompresi pendingin, sehingga daya motor berkurang ketika kompresor spiral tidak memompa. Dengan bergantian kedua kompressor bekerja dengan beban yg berbeda: kompressor loaded dan kompressor unloaded. Sebuah Valve solenoid PWM (Pulse With Modulation) mengatur gulungan spiral berputar atau spiral stais tanpa beban dengan menggunakan kesesuaian aksial. Controller memodifikasi waktu buka, dan waktu tutup, pencocokan kapasitas kompresor dengan beban yang diminta.
Copeland Scroll Digital Compressors
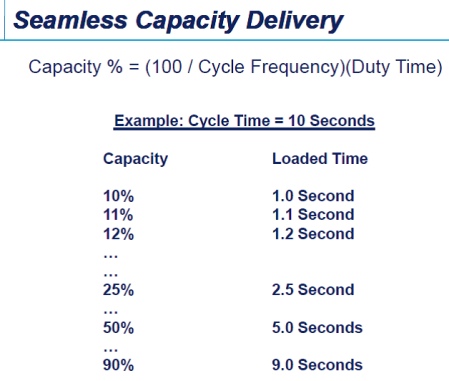
Kompresor Copeland Scroll Digital menggunakan kesesuaian spiral aksial untuk mencapai modulasi dengan memaksa gulungan untuk dipisahkan, menyebabkan kompresi refrigeran untuk berhenti tanpa menghentikan motor kompresor. Dalam keadaan “diturunkan”, output kompresor adalah nol kapasitas. Ketika gulungan terlibat dalam kondisi “loaded”, output kompresor adalah kapasitas 100%. Gulungan dipisahkan dalam siklus periodik (15 detik) untuk mendapatkan kapasitas waktu rata-rata-kompresor berdasarkan rasio waktu loading dan unloading. Hal ini memungkinkan kompresor untuk mencapai modulasi kapasitas tak terbatas antara 10% dan 100%.
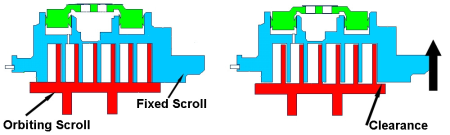
Menurunkan sebagian gulungan spiral dari bagian dudukannya yg mana mengakibatkan kompresi berhenti.
Teknik modulasi dengan pemisahan gulungan spiral ini terjadi sebagai respon terhadap sinyal PWM dari control board yg diteruskan ke valve solenoid untuk menahan arus refrigeran.
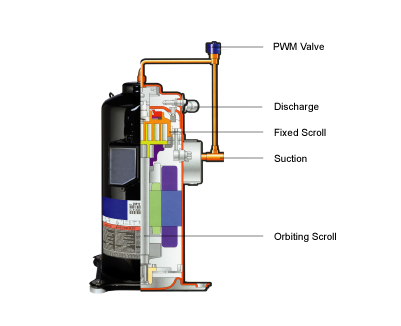
Gambar kerja PWM Solenoid
Kompresor diaktifkan antara keadaan loaded dan unloaded dengan siklus waktu biasanya 20 detik. Input daya turun mendekati nol selama periode unloaded.
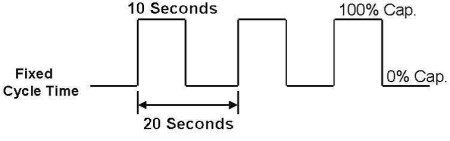
Dibawah ini diberikan contoh siklus periodik untuk modulasi kapasitas kompresor spiral .
Diperlukan 2 Unit kompresor yg mempunyai kapasitas sama untuk mengelola fluktuasi kapasitas yg efektif , satu kompresor untuk modulasi siklus kemudian dikombinasikan dengan kondensor yg bekerja penuh (full loaded).
bersambung